导读:目录 1. BiFPN论文简介 2. 在Common.py中添加定义模块(Concat) 3. 将类名加入进去,修改yolo.py 4. 修改train...
目录
1. BiFPN论文简介
2. 在Common.py中添加定义模块(Concat)
3. 将类名加入进去,修改yolo.py
4. 修改train.py
5. 修改配置文件yolov5.yaml
1. BiFPN论文简介
论文《EfficientDet: Scalable and Efficient Object Detection》地址:https://arxiv.org/abs/1911.09070
BiFPN 全称 Bidirectional Feature Pyramid Network 加权双向(自顶向下 + 自低向上)特征金字塔网络。
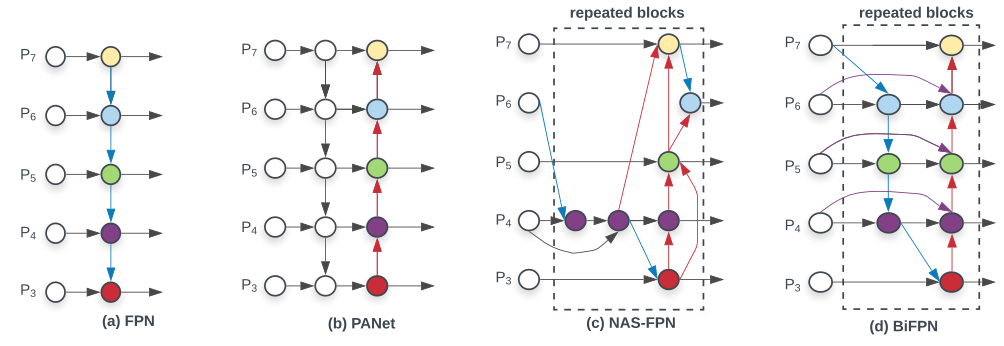
图中蓝色部分为自顶向下的通路,传递的是高层特征的语义信息;红色部分是自底向上的通路,传递的是低层特征的位置信息;紫色部分是同一层在输入节点和输入节点间新加的一条边。
- 我们删除那些只有一条输入边的节点。这么做的思路很简单:如果一个节点只有一条输入边而没有特征融合,那么它对旨在融合不同特征的特征网络的贡献就会很小。删除它对我们的网络影响不大,同时简化了双向网络;如上图d 的 P7右边第一个节点
- 如果原始输入节点和输出节点处于同一层,我们会在原始输入节点和输出节点之间添加一条额外的边。思路:以在不增加太多成本的情况下融合更多的特性;
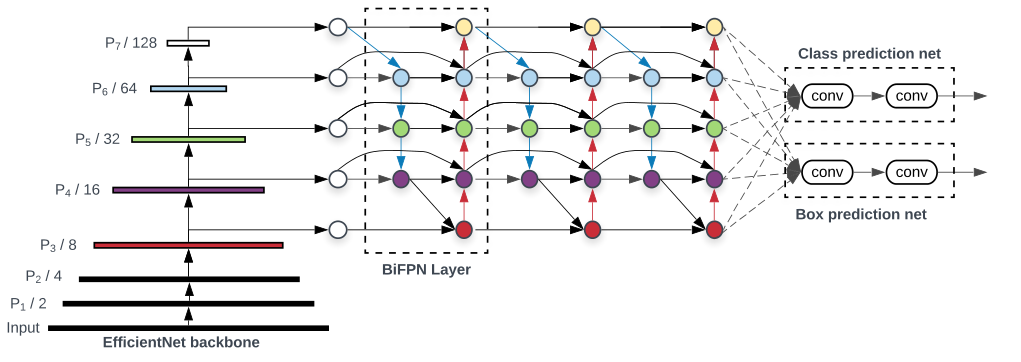
- 与只有一个自顶向下和一个自底向上路径的PANet不同,我们处理每个双向路径(自顶向下和自底而上)路径作为一个特征网络层,并重复同一层多次,以实现更高层次的特征融合。如下图EfficientNet 的网络结构所示,我们对BiFPN是重复使用多次的。而这个使用次数也不是我们认为设定的,而是作为参数一起加入网络的设计当中,使用NAS技术算出来的。
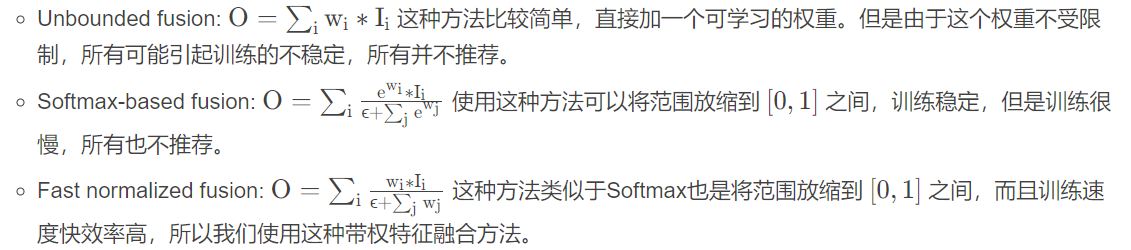
Weighted Feature Fusion 带权特征融合:学习不同输入特征的重要性,对不同输入特征有区分的融合。
设计思路:传统的特征融合往往只是简单的 feature map 叠加/相加 (sum them up),比如使用concat或者shortcut连接,而不对同时加进来的 feature map 进行区分。然而,不同的输入 feature map 具有不同的分辨率,它们对融合输入 feature map 的贡献也是不同的,因此简单的对他们进行相加或叠加处理并不是最佳的操作。所以这里我们提出了一种简单而高效的加权特融合的机制。
常见的带权特征融合有三种方法。
2. 在Common.py中添加定义模块(Concat)
# 结合BiFPN 设置可学习参数 学习不同分支的权重
# 两个分支concat操作
class BiFPN_Concat2(nn.Module):
def __init__(self, dimension=1):
super(BiFPN_Concat2, self).__init__()
self.d = dimension
self.w = nn.Parameter(torch.ones(2, dtype=torch.float32), requires_grad=True)
self.epsilon = 0.0001
# 设置可学习参数 nn.Parameter的作用是:将一个不可训练的类型Tensor转换成可以训练的类型
parameter
# 并且会向宿主模型注册该参数 成为其一部分 即model.parameters()会包含这个parameter
# 从而在参数优化的时候可以自动一起优化
def forward(self, x):
w = self.w
weight = w / (torch.sum(w, dim=0) + self.epsilon) # 将权重进行归一化
# Fast normalized fusion
x = [weight[0] * x[0], weight[1] * x[1]]
return torch.cat(x, self.d)
# 三个分支concat操作
class BiFPN_Concat3(nn.Module):
def __init__(self, dimension=1):
super(BiFPN_Concat3, self).__init__()
self.d = dimension
self.w = nn.Parameter(torch.ones(3, dtype=torch.float32), requires_grad=True)
self.epsilon = 0.0001
def forward(self, x):
w = self.w
weight = w / (torch.sum(w, dim=0) + self.epsilon) # 将权重进行归一化
# Fast normalized fusion
x = [weight[0] * x[0], weight[1] * x[1], weight[2] * x[2]]
return torch.cat(x, self.d)
更多文章请关注《万象专栏》
转载请注明出处:https://www.wanxiangsucai.com/read/cv177400

发布评论
全部评论(0)